The ancient mechanical control in my hot tub (Craigslist find under "You haul it away") officially died last year. I got tired of running it manually after a timer bypass, and decided that there must be a better way.
I'm becoming less and less enthusiastic about "Internet of Things" products that are really just a thinly-disguised way to sell software-as-a-service. This blog pretty much sums up my feelings on the matter.
If you've never designed an industrial control system before, this kind of project is an easy way to get started.
The first step was to decide what I wanted it to do. The basic requirements were:
Maintain all hardware safety features in the existing system. This included over-temp cut-off, a secondary over-temp by way of the existing mechanical thermostat, pressure-switch to enable the heater, GFI/earthing protection.
Include a high-accuracy real-time-clock (RTC) to trigger the outdoor lighting and maintance events.
Run a daily maintenance cycles to filter, chlorinate, and pre-heat the tub
Provide basic user controls for the jets, inside and outside lighting
Provide a a timeout feature if the jets are left on.
Allow for remote monitoring, logging and control at a later date.
Use hardware that is robust enough for 24/7/365 use outdoors, in an electrically-hostile environment.
Fortunately, I already had a head-start. I have a small company that does open-source electronics, a business that started out of our hackersapce. My Open Source RFID Access Control board, the AC400, is a pretty good industrial-grade microcontroller device that is hardened and ready to use for stuff like this. You can get one of these at the Wall of Sheep Store.
When starting a project like this, I first take the details of what I want and make a "Pin Budget." This is a spreadsheet that matches each project need to a specific pin of the microcontroller or board I am using, based on the capabilities.
Next, I take measurements and get the physical space constraints I need to fit the device into, including all externtal modules, switches, power supplies, etc. Here is the start:
In this case, I cut out a piece of cardboard that fit inside the old control box. I salvaged the pneumatic button switches from the old control and added a terminal strip from the junk box. I chose a 40A Crydom solid-state relay specifically rated for AC motor control. Some excellent notes about sizing and choosing SSRs is available at Crydom's site.
In operation, SSRs get hot. Since we would be space-constrained, I decided to go with a combination heatsink/mounting plate and use both sides for parts mounting. For about $10, I had a 1/8" thick Aluminum plate sheared to a custom size at Unicorn Metals, one of my favorite new and used metal dealers in Southern California.
This place is an Aladdin's Cave of new and used materials including sheetmetal, pipe, motors, fans, circuit breakers, fasteners, and large items like giant industrial tanks and restaurant burners.
After coating it with Dykem layout fluid, I began scribing lines and drilling holes to mount everything.
Getting closer. I tapped all of the mounting holes to avoid having nuts on the backside, which makes servicing a nightmare. The high-voltage items connect to the bottom strip, while the low-voltage connections happen on the small Euroterm strip at right.
In order to drill the mounting holes properly, I marked up the 1" spacers with a paint marker and stuck the unit in place.
The witness marks allowed me to drill the enclosure with an aircraft-length drill.
And here it is with everything mounted:
The final article used a 10K thermistor mounted in the original location, the new control board and wiring in front, the switches, SSR and a 12V, 5A DC power supply designed for outdoor lighting in back, and a dedicated ground bar tying all components together.
Here is the thermistor and the hacked control box being calibrated. I used a random thermistor I had laying around, so I needed to expose it to a couple of known temperatures to calibrate it. Here is a handy on-line tool for running the Steinhard-Hart equation.
I rewired this box for low-voltage operation and replaced the 110V Neon bulbs with LEDs that are controlled by high-power GPIO outputs from the board.
Note that the SSR and thermistor input need a small hardware change for best results: The 2.2K input-protection resistors were swapped out for 0-ohm parts. The ATMega 328P is still protected with TVS diodes, so this isn't a big deal.
And the Chlorine dispenser. It's a Rotochem unit that dispenses approximately 20cc per minute of operation. I'm using liquid Chlorine, and currently have it set to deliver 60ccs of Chlorine everyone morning at 0600, followed by 30 minutes of filtering.
And here it is under current test. Even though this SSR is rated to 40A, pump motors have a high startup current and the SSR must be derated to account for this.
The control program is event-driven. The original pneumatic hot tub buttons activate momentary switches, which trigger an interrupt servicing routing (ISR). One turns the jets/pump on and sets a 30-minute timeout variable. The other button changes the state machine for the interior and exterior lighting.
Temperature is checked every 30 seconds. This way, the gas heater isn't cycled excessively and it can allows the water in the pipe to equalize in temperature prior to the next check. There is also a 50C thermal switch that interrupts power to the heater, in case the other safeties fail. You can pick these up on Amazon for about $5, as they are a common appliance part.
There is also a "safety block" that runs on first bootup. It checks all of the LEDs and determines if the thermistor is reading a sane value (i.e. is not shorted or open). It will freeze the unit and go into an alarm condition with flashing LEDs if it detects this.
One issue: the thermistor is mounted in the equipment piping on my unit, which is exposed to the sun. If no water has flowed in a few hours, it can get hot enough to trip the safety code or switch. I recommend relocating the thermistor to a place that stays closer to the actual tub temperature if possible.
Interested in building one? Here is the Github link to the source.
"While your faith in technology is endearing,
it will ultimately be your undoing"
Arclight has an old 2600 tshirt with a friendly robot on the back, uttering this stark phrase.
When was the last time you looked around you at this technological society that has sprouted up around us, within our lifetimes? If you're under 30 years old, you barely remember a time before the internet; a strange far-off land where payphones and Thomas Guides helped us stay connected and get to where we were going.
Remember when "Information Forever" wasn't reality? Some time around 2008, roughly when humanity crossed the terabyte hard drive threshold, suddenly everything you've ever said and done online has been recorded, with metadata, for some kleptomaniacal reason that not even Edward Snowden understands.
Never before have humans ever been required with wrangling and maintaining a digital personality. Sure, you can go live under a rock somewhere without FaceSpace or Gmail, but the mere fact that you're reading this implies otherwise. There are enormous philosophical and psychological components of this tool that we can barely comprehend, much less plan ahead for the inevitable technological singularity.
During DEF CON earlier this year, DARPAsponsored an event that is edging us closer to true artifical intelligence than humanity has ever seen. Luckily, SKYNET didn't wake up at that moment, humanity is safe for now.
Do you think humanity is going to be satisfied until we get to that point? Do you think we even have a choice in the matter?
Remember not long ago when your cellphone was a single purpose device? No malware, no Angry Birds, no Pokemon? Now you're carrying around a general-purpose computer that not only makes phone calls, shows you around town, spies on you, is connected to billions of devices over the internet, with more computing power than supercomputers from a generation ago! A question to ask yourself is, what do you think these devices will look like, and how will they behave in unintended ways a generation from now?
All it would take is a simple solar flare to ruin everything we hold dear. What happens if the earth's magnetic poles decide to flip? Imagine, if you can, if the Internet were to go down for some mysterious reason, and stay down, for a month. How would people transact buisness? How would people communicate with each other over vast distances? We'd be instantaneously sent back to the 1950s. Who knows how to make vacuum tubes anymore?
Self-driving cars will kill at least as many humans as human-driven cars, but with far less personal culpability and moral decision making ability than ever before.
You go on ahead and catch those pokemon. I think I'd rather stay right here with my books and tinfoil hat.
Have you always dreamed of having a more meaningful way to interact
with your 3D printer, other than exclusively printing things you found
on Thingiverse? Have you ever needed to conjure a specific shape out of
thin air? The quickest way to up your 3D printing game is to learn a
flavor or two of Computer Aided Design.
Freshly returned from the Mandelbrotian fractal shores of SIGGRAPH,
my heart swells with 3D printing. Although primarily a computer
graphics conference, all the major players in Additive Manufacturing
were out in force: Stratasys, 3D Systems, and Formlabs (Thanks for the coupon code). Arguably, 3D printing isn't as much of a hot topic today as it was two or three years ago.
Why do you think that is?
Hypothesis: lack of hobbyist CAD users.
By
now I'm sure you've heard my plastic Yoda head tirade. TL;DR - When
given technology reminiscent of Star Trek replicators, why is it that
most users produce junk inferior to that from a Mold-A-Rama?
Worthwhile CAD tools have traditionally been equal parts unaffordable and challenging to learn.
There
was a time, not long ago, when you had to be a degreed professional,
backed by a corporate bank account, to access CAD tools. Hell, it
wasn't until the late 90's that desktop computers were fast, small, and
economical enough to run CAD applications, which still to this day can
cost thousands of dollars. One of the most widely-accepted CAD tool
today, CATIA, isn't widely taught at the university level, despite
having thousands of installations at major corporations like Boeing and
GM.
Today is a totally different world. Off the top of my head I
can think of a handful of very powerful CAD tools that are available to
use for free, or nearly free. I grew up on Solidworks, so moving to Onshape
was like moving from Coke to Diet Coke; the general flavor is similar,
with less calories. Recently, I've spent an awful lot of time in Autodesk Fusion360
lately, and I must say, the more I use it, the more I like it. Where
else can you find such powerful CAD/CAM tools that will take your shape
and output code to your CNC machine? The price is definitely right,
too.
For the more masochistic types out there, there's always Freecad (huh?), Sketchup (no thanks), and OpenSCAD (nope nope nope). Keep
in mind that 3D software breeds cliques that put teenage girls to
shame. Alls I'm saying is that there are options nowadays.
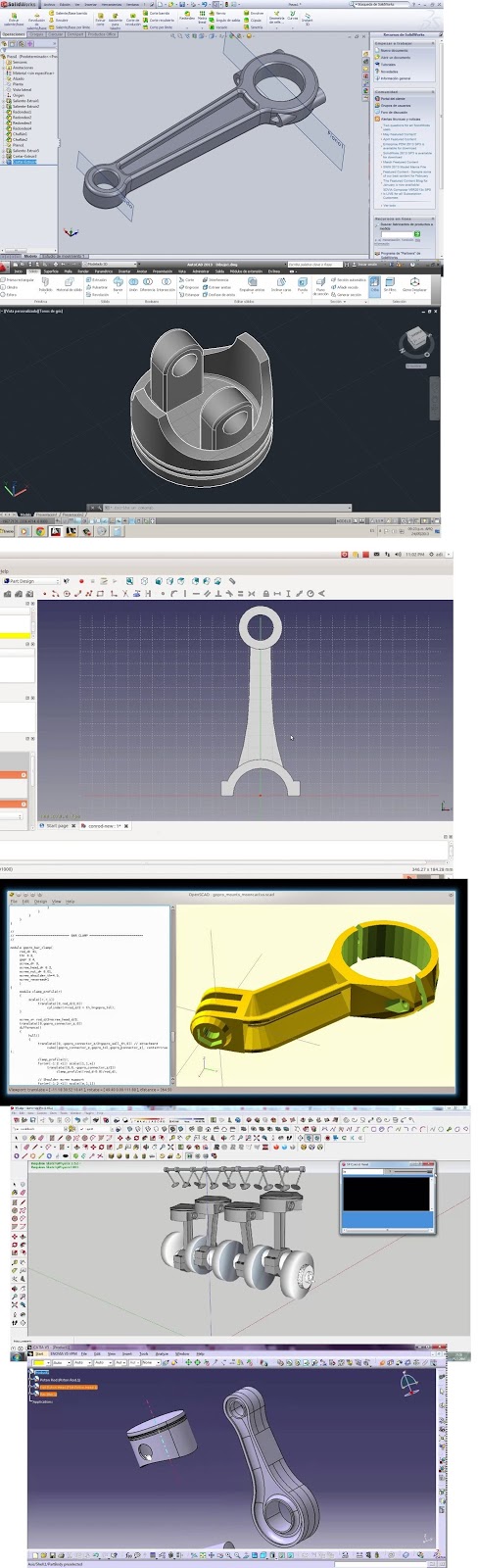
On the left, you see
the same basic design replicated in many different CAD environments.
From the top, you have: Solidworks, Autocad Inventor, Freecad,
OpenSCAD, Sketchup, and Catia. That's only naming a few of the choices
out there.
They all will make the same part, the difference is in
approach. Every single one of these softwares will output the fabled STL
file, universally accepted by 3D printers everywhere*.
So far
we've only covered CAD tools for engineering-type modeling. We haven't
begun to explore the world of Direct Editing. Instead of designing
parts in terms of dimensions and absolute shapes, Direct Editing, also
known as Subdivision Modeling, is more like sculpting a statue out of
clay. I don't have any personal experience with any of those yet, I'll
get back to you when I do. To rattle off a few names: Maya, Zbrush,
Blender, Rhino.....
Wise grandfather say - "The best time to plant
a tree was twenty years ago. The second-best time to plant a tree is
now." Whether you cut your teeth on Autocad '88 or have never touched
CAD tools before, today's availability and accessibility of such tools
is unprecedented. It certainly won't be a burden to your life to have a
smattering of CAD, I promise.
Imagine what tomorrow can bring,
considering that software development isn't going backwards any time
soon.
After a few years of plodding along the hackerspace / shadetree engineering path, I have encountered the same problem multiple times in multiple forms. Once in a while, you need to translate an object which exists in the real world, into the digital world.
Let's say you need a 3D model of the members of your band for a cool video.
In the old days, this was a tedious and manual process, to digitize anything, lacking any pre-existing tools that could easily facilitate the project. Take Rebecca Allen, for example. She worked for TWO YEARS to create the above 1986 Kraftwerk video. Here she is pictured with a reference model of drummer Karl Bartos, plotting each point by hand with a digitizer, using homebrew software.
Even if robust digitization tools existed 30 years ago, computer processing power at the time was generally unable to adequately handle the sheer volume of computation required for rendering even the simplest of 3D scenes.
In 1982, it was even HARDER to digitize objects. Remember Tron?
The Evans and Sutherland Picture System 2, which was used to render Tron, had a whopping 2 Megabytes of RAM, and 330 Mb of disk space. A large percentage of the effects in this film were actually Rotoscoped by hand, rather than using a computer to add visual effects.
Today, you can buy a Google Tango tablet, designed specifically for 3D imaging, with 4 Gb of RAM, a flamethrowing nVidia processor, all sorts of bells and whistles, for ~$500. Put in relative terms, an iPad2 has equivalent GFLOP processing power of the most powerful Cray supercomputer from 30 years ago.
You carry this around in your bag, like it's no big deal, and use it mostly for Flappy Bird.
But I digress.
The point I'm trying to make, is that we are now carrying enough processing power around in our pockets to be able to accomplish sophisticated 3D imaging, which was previously computationally prohibitive.
Beyond the absurd availability of computational power today, lots of research has been performed in the last 30 years in the field of computer simulation, ray tracing, and other relevant algorithms. All this research adds together to allow this deluge of computer power to be specifically focused on the task at hand, in this case 3D imaging and reconstruction.
In previous blog posts, we covered a low-cost scanning technique using the Microsoft Kinect sensor. Initially not intended for use as a 3D scanner, massive development of the Kinect ecosystem by Microsoft and others has created a wake of alternative uses for the Kinect hardware.
One challenge with scanning using the Kinect is the trade-off between scan volume and resolution. The Kinect is capable of scanning physical space ranging from 0.5 to 8 meters in size. Instead of pixels as you would have in a 2D environment, the Kinect tracks "voxels" in a 3D environment, in an array of roughly 600 x 600 x 600 elements. In the highest quality settings, this makes for an minimum tolerance of +/- 1 mm of error, about 1% overall, in the resulting scan data. This is great resolution when scanning items about the size of a shoe box, 0.5 m^3, but sometimes you want to scan larger objects that the Kinect would struggle to visualize with high enough resolution.
What about scanning objects smaller than 0.5 m^3? The Kinect has a miminum scanning distance of ~600 mm, and has a difficult time visualizing small features on small parts.
Using photogrammetry (specifically, stereophotogrammetry), all you need is an array of photographs from different angles of the same scene, and a properly configured software stack.
There are a few photogrammetry solutions on the market ranging from free to very expensive. Most of these softwares essentially do the same thing, the main distinction being that 123DCatch performs remote processing on the cloud, where CapturingReality performs the required calculations locally. Due to this fact, your choice of software boils down to what quality of hardware you're using.
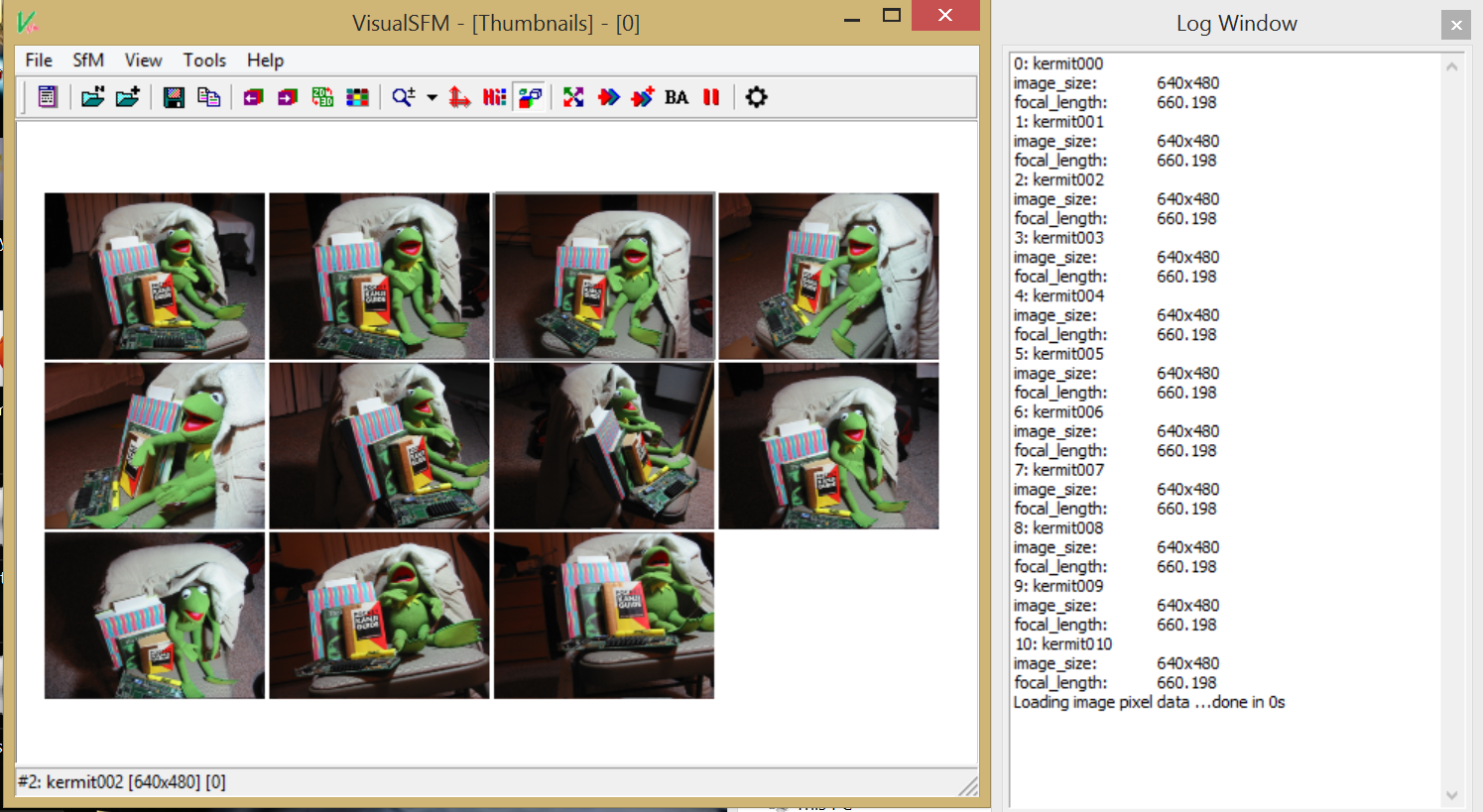
My toolchain of choice for this process is twofold: VisualSFM and Meshlab. Both of these tools are free, mostly open-source*, and quite robust once you know how to coax the proper filtered data out. The main benefit of this toolchain is that they're freely available for Linux / Mac / Windows. It can even be done without CUDA cores, although it seems that some optimization for the process is achieved with using CUDA architecture GPUs
VisualSFM is used to sort an array of images, and apply the SIFT algorithm for feature detection on each image. This processes each image using the Difference of Gaussians, one method for computerized feature recognition, along with a comparison between each frame. The software is then able to infer a relative position and orientation for each camera.
Meshlab is
used to perform a mathematical reconstruction of the VisualSFM output.
VisualSFM outputs a cartesian point cloud, and it's your job as the
creative human to make sense of that data (turns out 3 Dimensional matching has been proven to be NP-hard).
A point cloud by itself isn't
inherently useful. With Meshlab, we perform a conversion of the noisy
point cloud to a high quality, watertight triangular mesh which can then be used in all sorts of applications like reverse engineering, 3D printing, VR and AR, computer vision, et cetera.
We first perform a Poisson surface reconstruction to create a solid, triangular-faceted surface with a high quality alignment to the original point cloud. The resulting mesh can tend to be noisy, so a few filtering algorithms are applied to smooth the surfaces and edges and clean the outliers. Essentially, all you're doing is noise filtering.
Mesh size is of crucial importance for computability. Sometimes the meshes reconstruct with millions of faces, which can be challenging to process on anything but modern gaming rigs with giant GPUs. Furthermore, our resulting reconstruction is rough, aesthetically approximating a surface, rather than being a 99% dimensionally accurate representation of the surface. Such a high quality of reconstruction is approachable using strictly photogrammetric or structured light techniques, but probably better suited to Time-of-Flight laser scanning techniques like that of the NextEngine. TOF scanners can achieve micron-scale resolution, unlike triangulation scanners like the Kinect.
Do we need to reconstruct a scene in a video game, requiring a low quality model with a high quality, registered texture? Do we need to recreate a shape with a high dimensional accuracy, with no consideration to texture or color? Photogrammetry can accomplish both, but is better at the former.
Meshlab is used to robustly modify the reconstructed mesh surface with mathematical processes (you should probably also look at Meshmixer). Some of the more challenging, opaque problems can hide deep within the mesh, like a single non-manifold vertex which may never appear in the visual rendering. This can be solved with a quick selection filter, and deleting the offending geometry. "Quadric Edge Collapse Decimation" is used to reduce the polygon count of the resulting surface. My favorite filter lately has been "Parameterize and texturize from registered rasters" which creates an awesome texture map with VisualSFM output.
Once you have the clean, reconstructed surface, save the file somewhere memorable. VisualSFM has an output file called "bundle.rd.out" which is a sparse reconstruction of the surface, along with "list.txt" which is the list of registered raster images we're going to use to apply color to the reconstructed surface. By importing the reconstructed surface into this new workspace, we can superimpose the aligned raster images with the reconstructed mesh, then projecting the color with a little software magic.
The resulting surface can be further refined by applying different shaders and lighting schemes.
Granted, there is a small amount of visual distortion in the resulting reconstruction and texturizing of the mesh. I'm sure with a few dozen more images of this scene, along with more processing time, that would result in a more accurate volumetric representation of the scene. To achieve a higher quality texture map, a little more love needs to be used when parameterizing the raster images onto the mesh.
One thing to remember is that photogrammatically reconstructed surfaces have no inherent relation to scale. This can be corrected with a comparison to a known reference dimension. We could probably look up on Amazon the dimensions of the "Pocket Kanji Guide", and appropriately scale the data. In this instance, accuracy in scale isn't the main intent. If inserted dimensionally accurate references into the photo, rescaling should be reasonably accurate. Meshlab's default output unit is in millimeters.
Compare the result of our quick, admittedly low-quality reconstruction (using a dozen VGA-resolution images), versus one with hundreds of reference photos and processed overnight using expensive (but very good) software. These images are probably taken on something with better than VGA resolution.
A few limitations -
Since we're using visible-light techniques, we have to deal with optical restrictions. Reflections and shadowed surfaces are troublesome to reconstruct. Diffuse, even lighting conditions are optimal for photogrammetric reconstruction, so try taking pictures outside on a cloudy day. Lens choice is also important, with a 35-50 mm lens most closely approximating the human field of view with the least amount of distortion.
Objects scanned with photogrammetry techniques should typically remain still while capturing data. It's possible to assemble a camera rig with n cameras in various orientations around a common scene. Multiple instantaneous views could then be processed using these techniques.
The SIFT algorithm works best when applied on images with lots of orientable visible features, like repeating vertical and horizontal lines and contrasting color; not so well with objects like a plain flower vase where all sides appear the same.
The toolchain is painfully disjoint, requiring extensive domain knowledge and a mostly undocumented software stack to make sense of the subject. We have yet to attempt importing the resulting mesh into engineering software like Solidworks, which would require conversion of file type using yet another piece of software. We've used FreeCAD to convert the mesh to IGES format, but this can also be done with propietary software packages like GeoMagic. The conversion can be non-trivial and lossy, akin to making vectors from rasters.
A few benefits -
Apart from being a non-contact reconstruction method, photogrammetry lends itself well to scaling. Very small or very large objects can be reconstructed with similar ease. Your only limitation for mesh size is how much horsepower your workstation has. Meshlab / VisualSFM can also be configured to run on AWS cloud, which has options for choosing GPU heavy machines.
You can also grok crowdsourced images from Google, and use people's vacation photos of visiting the Coliseum in Rome, feeding the resulting data into VisualSFM with impressive results. Screen captures from videos? No problem. In fact, you could walk by your scan target with your cameraphone recording a high definition video of the target, and reconstruct these things later. Soon, this is a process that will happen on-the-fly.
Only recently has technology become affordable enough and accessible enough to whimsically perform these types of operations on a large data set like a complex, textured 3D object. Although Moore's law is tapering off, processor power continues to get cheaper and smaller. It's exciting to consider what will develop in the near future as people continue to discover more efficient algorithms, better sensors, and more creative applications.
What kinds of interesting things can you think of to use this technology for?
*VisualSFM, by Changchang Wu, is a closed source program developed from scratch. SiftGPU is Open sourced. The SIFT algorithm, by David Lowe, is patented in the US to the University of British Columbia. Meshlab is released using the GPL license.
If you've ever been to an event at 23b Shop, you probably know Bobby, the loveable biker dude from a few doors down.
Bobby has been to nearly every hacker potluck in the last four years, every single Sparklecon, and is always willing to lend a hand in causing some random mischief. Ever crank handles on our old Bridgeport mill? That came from Bobby's shop.
Bobby isn't a hacker in the sense that he's writing bash scripts (although he's using Linux Mint as a daily driver, with a microwave bridge hooked up to our NAS device). Bobby is more of a life hacker.
Bobby works on Harleys, a trade he learned from his Ex-Father-in-Law, Neal. Neal has operated a Harley shop in Orange County since the 70s. Neal is now in his 70s himself, and is falling apart slowly from Parkinsons and dementia. Bobby has taken it upon himself to look after Neal over the past few years, at immense personal cost. Bobby is Neal's full-time, unpaid care giver. Bobby has a heart of gold, and is self-describes as being "patient as a rock".
Neal used to be a real bad dude, 6'4" of big mean biker gruff. Now, Neal is 98lbs soaking wet, hunched over, barely able to speak, requiring 24-7 live in care to help manage things like catheters, gastric tubes, showers, going to the bathroom, back and forth transportation to the local VA hospital for numerous procedures and appointments, and all sorts of things like that. Neal is also a stubborn old coot who would rather die on his terms in a motorcycle shop than rot away in a frog pond. Bobby does his very best to indulge Neal's wishes.
Except now.
They have to be out by the end of the month. The landlord denied a renewal of their lease on their Harley shop.
This would be an inconvenience to anyone, for sure. Beyond the decades of accumulated stuff they have scattered about their shop, there's another complication. Their shop is also their home.
Bobby has a bit of a Catch-22 on his hands. Neal would qualify for some more assistance through the VA if he had a residential address, but they live in a commercial space. The business doesn't make enough money to support an external residence, and Bobby has been spending so much time caring for Neal that no real meaningful work can be done in the shop.
Bobby is the resilient sort, he will be fine and land on his feet somehow. It's how to take care of Neal that is the concern. Neal would be homeless were it not for Bobby, but it's beginning to look like that hand is being forced.
Short of taking care of Neal myself which I am completely unqualified to do, I believe we can come together as a community to give Bobby a little monetary boost to help him in his time of need. He has some good stuff in exchange as well.
Neal's big old Hendey lathe is for sale.
This lathe is a BIG boy, a very fine example of machinery worth preserving.
I'd like to get Bobby a good price for this lathe and move it over to 23b Shop. That money would be enough to foot the bill for an apartment for a month or two, long enough for them to get on their feet and the wheels cranking for VA benefits that would apply to them now that they would have a residential address, or to find Neal more permanent skilled care and free Bobby so he can find work himself.
But wait, there's more -
The lathe that is currently in heavy rotation at 23b Shop would be moved to Mag Lab as a hand-me-down, but still a quite excellent machine no less. There's even a whole slew of tooling that will come along with both machines, so no one leaves empty handed. I've already worked out the details with Trent and Arclight, this plan is a go once we put some much-needed cash in Bobby's hand.
I started out at 23b Shop on the lathe. All the success in my adult life I owe to the things I've learned at 23b, and I'd like to give back to you guys. If anyone donates $100 or more, I'll make time to teach them a half-day, hands-on lathe class at their hackerspace of choice. I also do 3D CAD, 3D printing, 3D scanning projects, services and lessons as well, all of which I'd be happy to exchange for donations toward this worthy cause. Anything helps, cash is best since bikers don't really do Bitcoin, but we can certainly take a Paypal donation in their name. Let's make this happen by this month's Hacker Potluck on February 20th.
Can't make a monetary donation, but are able to lend a hand? We'll need a few strong backs toward the end of this month to help sort and process and package their inventory before it gets sent off to storage.
Perhaps someone out there has some insight to social services that we aren't aware of that would make their challenges less painful?
By helping Bobby and Neal, we also can up our own game and hack better by putting more of Neal's good old machines back in the hands of hungry hardware hackers, where they will be loved and fostered as their original owner fades away into the inevitable, never-ending night.























{kind=link}